
人材不足の中、受け入れ工程の効率化がなかなか進められない。
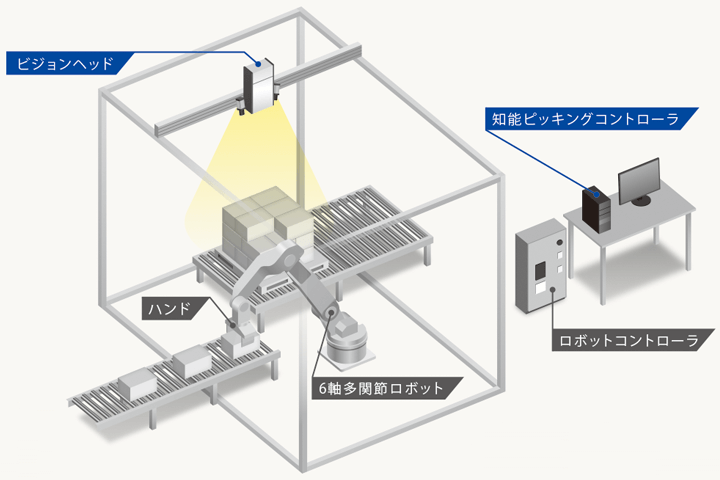
受け入れ工程は、ほぼ人手作業となっている。
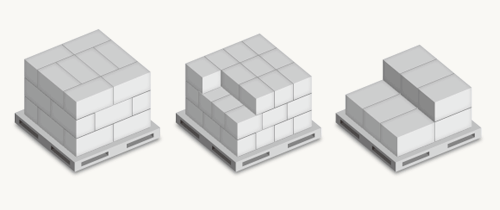
受け入れる材料はメーカーごとで梱包される段ボールの寸法がバラバラであるため、その都度に手間のかかる設定作業は難しい。
材料により、それぞれの重さが違う。
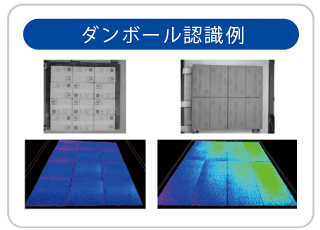
「マスターレス/ティーチングレス」仕様で、事前の段ボール箱の寸法、質量の情報が不要。時間のかかるティーチング作業が不要となり、短時間での運用を開始できた。
最適な搬送速度でサイクルタイム短縮。段ボール箱のサイズと質量を測定することで最適な動作速度で搬送できるようになった。