退職した作業者の穴埋めができず複数の作業を一人の作業者が担当し、設備・作業にダウンタイムが発生、納品に遅れが生じている。
単純で過酷な作業の為作業者が集まらない。
産業用ロボットを導入したいが安全柵等が必要で設置するスペースが無いため、大がかりな設備変更が必要になる。
協働ロボットを採用したことにより、省スペースで既存設備を生かしたまま導入ができた。
操作が容易で製造品種の変更の際の段取り変えの時間も短い。
作業効率が上がり、省人化も実現できた。
安全柵がある時は高速動作、外した時も協働ロボットとして低速での作業可。
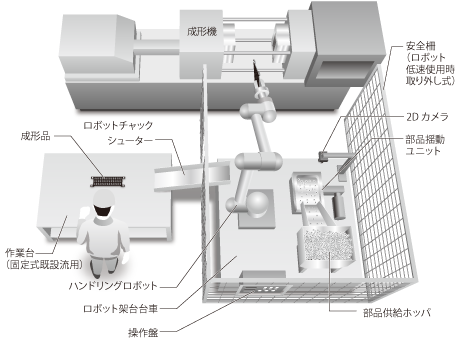
〈 成形製品取り出しと部品インサートを多関節ロボット(協働)で行うシステム 〉
既設成形機にて成形された製品をロボットにて把持し、シュータにて作業者側に取り出し。
ホッパ及びワークテーブルに供給されたインサート用部品をカメラにて位置認識し、
ロボット位置補正にて把持を行い、成形金型に挿入する。