![]()
レーザを使ったリアルタイム測位システム
ICHIDAS Laserのオートメーション新聞掲載内容はこちら
2025年4月23日のオートメーション新聞に紹介記事が掲載されました。
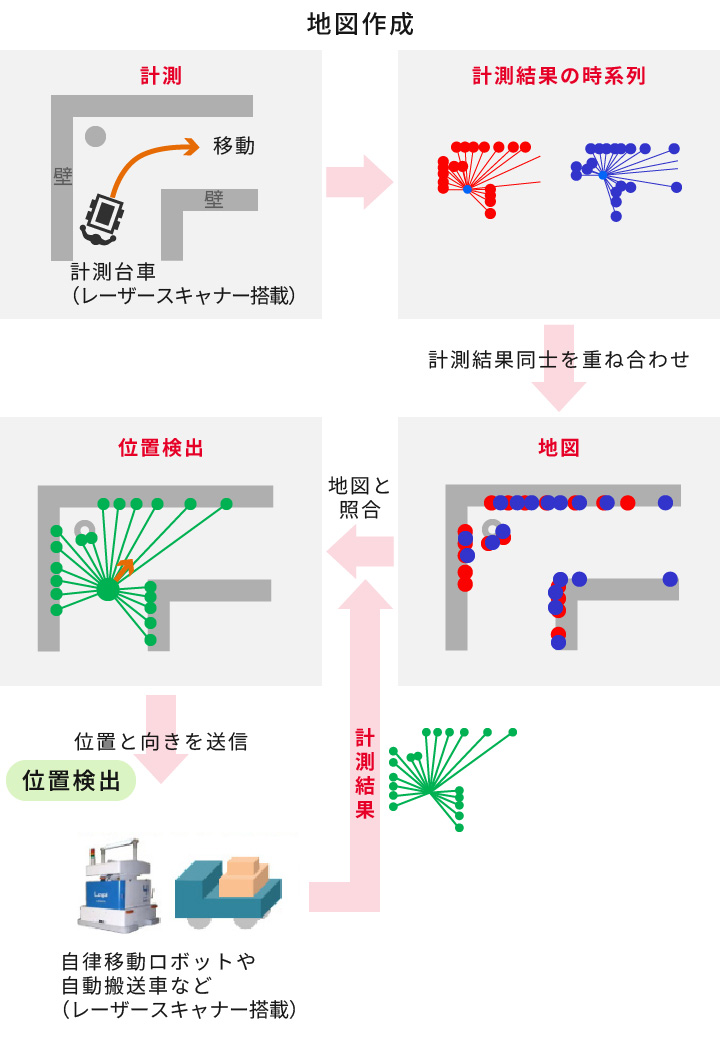
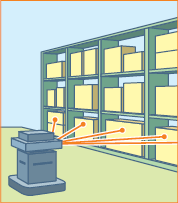
レーザースキャナーは周囲にレーザ光を照射(スキャン)し、光が当たった点までの距離を測ることができるセンサです。ICHIDASはこの計測結果を重ね合わせることで地図を作り、さらにその地図を用いて位置を検出することができます。
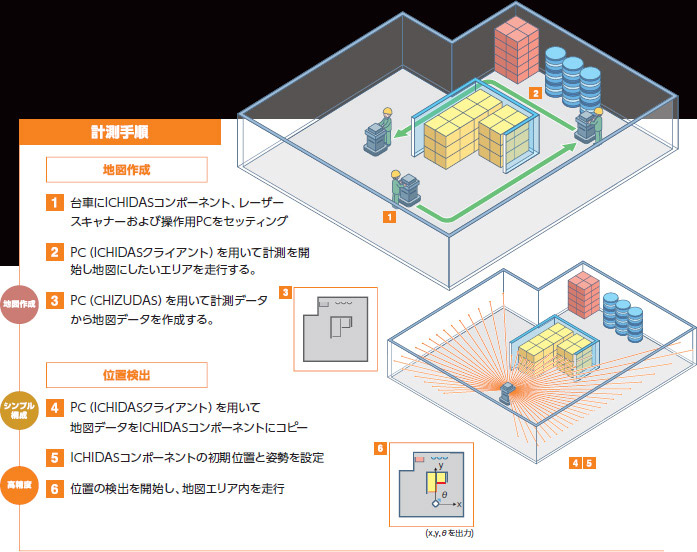
ICHIDASはレーザースキャナー、コントローラ、地図作成ソフトによって構成されるシステムです。レーザースキャナーとコントローラは車両などの装置に組み込まれ、位置と向きを出力します。地図作成ソフトはPCにインストールし、レーザースキャナーの計測ログから地図を作成するために用います。
ICHIDAS Laserの高精度な位置検出機能を用いることで、ガイドなしで自己位置を検出できます。
ガイドを用いないので、レイアウト変更に対して容易に対応できます。
※:Automated Guided Vehicleの略、無人搬送車
設備の点検を自動に行う移動ロボットの自己位置の検出や掃除や電動車イスなどの生活を支援する移動ロボットの自己位置の検出に利用できます。
ICHIDAS Laserは屋内の地図を作成することができるので工場建屋内の機材配置の確認や屋内フロアのMAP作成などに利用できます。
地図の保存形式はpngとSMP(独自形式)になります。

ICHIDAS LaserにGNSS*を組み合わせることでシームレスに屋内外の位置を検出することが可能となります。
屋内外を移動する車両などにご活用いただけます。
*詳細については、お問い合わせください。
| 製品名 | レーザ測位システム ICHIDAS Laser |
レーザ測位システム ICHIDAS Laser NAV |
|
|---|---|---|---|
| 型式 | ICHIDAS2-L7X | ICHIDAS2-L7X-NAV | |
| 外観 |  |
||
| 対応レーザースキャナー | UTM-30LX-EW、UST-20LX、UAM-05LP-T301/T301C URM-40LC-EW、UST-30LX、UST-30LC (上記型式は全て北陽電機(株)製となります) |
||
| 付属ソフトウェア | ICHIDASクライアント、CHIZUDAS(製品型式ごとに専用品となります。) | ||
| ハードウェア仕様 | 寸法*1、質量 | 122×93×41mm、約0.47kg | |
| インタフェース | LAN×2ポート お客さまシステムとの通信用、センサ用 |
||
| CPU | Intel Atom™ E3845 1.91GHz | ||
| メモリ | 2GB | ||
| データ保存領域(SSD*2) | 32GB(内8GBユーザー活用可能) 地図保存枚数:500枚相当 |
||
| 温度・湿度 | -10℃〜+50℃ 湿度10%〜90%RH(結露無きこと) |
||
| 電圧/電力 | DC6-37V/7.3W(Typ.) | ||
| 電源コネクタ | Molex 5557-04R | ||
| 位置認識方式 | レーザースキャナーの計測データと地図のマッチング | ||
| 標準機能 | 位置検出(出力) | 位置x、y[mm]、姿勢θ[°] (座標系はx:水平軸、y:垂直軸、姿勢:x軸となす角、原点は地図の中心。) ※原点の定義が可能 |
|
| 出力周期 | 平均 25ms(但し、UAM-05LP-T301/T301C仕様時は平均30ms) | ||
| 認識精度(静止時) | 位置:±50mm*3、姿勢:±3°*3 | ||
| 繰り返し精度 | ±10mm*3 | ||
| 地図作成(CHIZUDAS) | 自動作成、250,000m² (例、500m×500m) 計測一時停止、データ間引き、座標系調整ツール |
||
| 地図切替 | 高速切替(25ms) | ||
| 通信フォーマット | オリジナルフォーマット(UDP) | 従来機能:オリジナルフォーマット(UDP) AGV制御:ModbusTCPマスター |
|
| 拡張機能 | 無効領域設定機能、 位置検出失敗判定機能、 センサ2台対応 |
無効領域設定機能、 位置検出失敗判定機能、 センサ2台対応、 準SLAM機能、地図部分更新機能、 ステータス管理機能、 アクション対応版RouteEditor、 WEB GUI、車両制御機能 |
|
| 有償オプション | ICHIDAS | 準SLAM機能、PCレス地図作成機能、 仮想ガイド機能 |
準SLAM機能、PCレス地図作成機能、 仮想ガイド機能 標準搭載 |
| CHIZUDAS | 地図部分更新機能 | 地図部分更新機能 標準搭載 |
|
【機能説明】
| 無効領域設定機能 | : | センサ近傍にある計測データを除外するための機能。車両本体を計測してしまう場合などに利用。位置検出性能の向上に有効。 |
|---|---|---|
| 位置検出失敗判定機能 | : | 位置の検出が正しく行われているか否かを判定するための機能。 |
| センサ2台対応 | : | 前方後方に2台のレーザースキャナーを配置する事により、360度の環境で安定的な位置検出が可能。 |
| 準SLAM機能 | : | 地図上において頻繁に物品の配置が変わる領域を地図更新領域として指定し、リアルタイムに更新することで位置検出の安定性を向上させるための機能。 |
| PCレス地図作成機能 | : | 地図作成ソフトウェアCHIZUDASを用いずにICHIDAS本体で地図作成を行う機能。 |
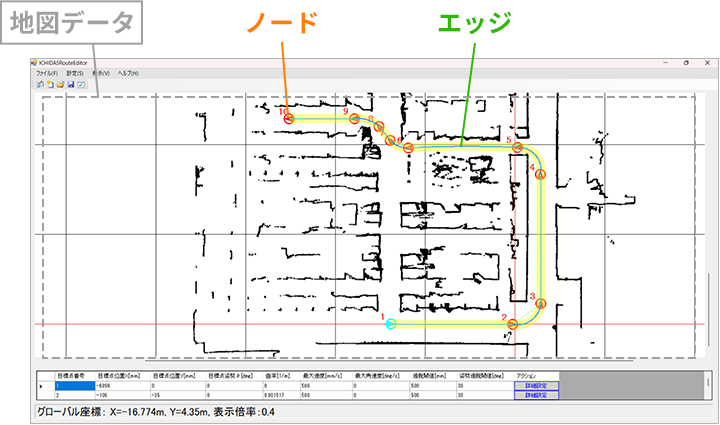
| 仮想ガイド機能 | : | ICHIDASの地図データ上に経路データを作成し、経路データに追従するための偏差情報を出力する機能。 |
| 地図部分更新機能 | : | 設備の移動や間仕切りの追加など固定物のレイアウト変化時に地図データを更新するための機能。 |
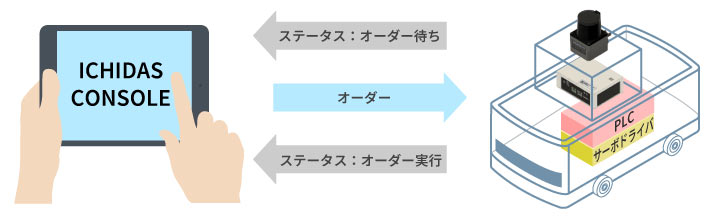
| ステータス管理機能 | : | AGVの状態(ステータス)がリアルタイムでユーザに通知され、ステータスの状態によりオーダーが発行可能かを判断できる機能。 |
| アクション対応版 RouteEditor |
: | 仮想ガイド機能で使用するRouteEditorに荷物積み下ろし等のアクション機能を追加。 |
| WEB GUI | : | WEBブラウザからアクション設定やステータス確認等ができる機能。 |
| 車両制御機能 | : | 経路追従の為の制御信号やAGVへのアクション等をModbusTCPで通知する機能。 |
・Intel Atomは、アメリカ合衆国およびその他の国における Intel Corporation の商標です。
※製品改良などにより外観および記載事項の一部を予告なく変更する場合があります。